

1. ROS 101 Series Overview

Search for a command to run...
No comments yet. Be the first to comment.
As said in the previous post, I will not wait until the robot is complete and then make tutorials. This project log contains all the newest updates (ideas, changes, problems, etc.) that I encounter during this project from the start to the end. As al...

After the ROS 101 series, I am now planning to bring the mobile robot to life. Below are my rough idea and plan, but they will be updated regularly as the project grows. So stay tuned! The Idea The goal of this project is simple: to understand how al...

Trong chương cuối cùng của sê-ri ROS Cơ Bản này, chúng ta sẽ kết hợp mọi thứ đã học được cho đến nay để hoàn thành một nhiệm vụ cuối cùng: di chuyển robot bằng cử chỉ tay. Ý tưởng Ý tưởng để làm phần này thật ra rất đơn giản và cũng không có gì mới. ...

In this final chapter of the series ROS 101, we are going to combine everything we have learned so far to finish one last challenge: moving the robot with our hand signs. The idea The idea is pretty simple and there is actually nothing new. In the pr...

Hãy cùng tiếp tục chương trước bằng việc dùng Xacro để cải tiến mô tả robot (URDF) và thêm nhiều thuộc tính hơn để mô phỏng và điều khiển robot trong Gazebo. Code ở phần này nhìn có vẻ dài dòng (vì XML luôn yêu cầu các thẻ mở và đóng) nhưng thực ra r...

In this series, I will guide you through 5 main steps (see the figure below) in order to help you understand and start using ROS by yourself with the minimum requirements in hardware setup. Yes, I really mean "do it yourself" because I think the great way to learn something is by doing (the best way is of course by teaching it :) ).
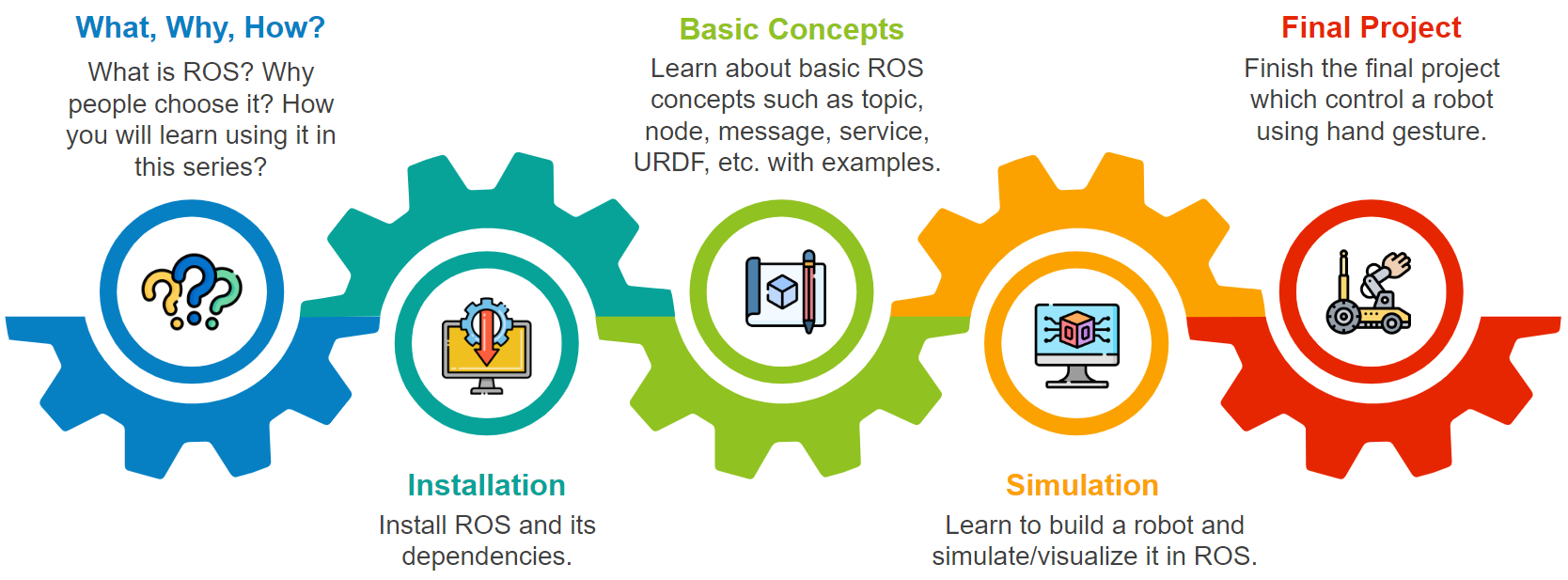
We will start by answering those questions of what is ROS, why people (and you should) choose ROS, and how you are going to learn about it through these tutorials. The second step is installing ROS and all the dependencies required so that it is up and running on your laptop. Next, we will take a look into the most basic concepts of ROS and practice using them. You also learn to create a simple mobile robot, simulate and move it around. Finally, we connect everything we learn to finish a project in which the robot created from the previous part will follow your hand sign.
So what are the requirements to complete all those parts? I know that most of you are probably beginners in this field and do not have (or even can't afford) fancy tools like graphic cards, motors, motor controllers, etc. to build a real robot but that is totally fine since one of the main ideas of this series is to learn ROS with the least effort.
For the hardware, you need a laptop or PC with a webcam (more about the specification can be found below). I would prefer laptops because most of them already have an integrated webcam but if you have a PC then getting a USB webcam also works (and it's pretty cheap though). And why do I need a webcam, you may ask? Well, because it is just like a sensor people are using in real robotics projects (most of the cameras used in industry are pinhole cameras just like your laptop's webcam though). Also, I choose a camera instead of other sensors because it's commonly available, fun, and easy to demonstrate ideas rather than just printing something on your screen.
For the software, you should have a little knowledge of programming in Python or C++ since they are the two main languages supported by ROS (Python will be mainly used in this tutorial). If you know about Linux and already used it sometimes then it would be a big advantage. If not, no problem! It's time to get to know one of the most awesome operating systems for developers. You also don't need another computer or a dual-boost system to get started. I come to this later in the Installation chapter.
Here are the concrete minimum requirements:
A laptop or PC (no specific OS needed) with an integrated or USB webcam. The computer should have at least 4GB RAM, quad-core Intel® i5, or equivalent, and, at least 20 GB of free disk space. A graphic card (GPU) is nice-to-have.
A little knowledge of programming with Python or C++ (or any OOP languages)
And that's it! You are ready to begin your journey of conquering ROS. Let's step right in!
ROS 101 Series has total 12 chapters:
Cover photo: http://wiki.ros.org/cturtle
Icons: https://www.flaticon.com/