

5. ROS Packages and Workspace
Search for a command to run...
No comments yet. Be the first to comment.
As said in the previous post, I will not wait until the robot is complete and then make tutorials. This project log contains all the newest updates (ideas, changes, problems, etc.) that I encounter during this project from the start to the end. As al...

After the ROS 101 series, I am now planning to bring the mobile robot to life. Below are my rough idea and plan, but they will be updated regularly as the project grows. So stay tuned! The Idea The goal of this project is simple: to understand how al...

Trong chương cuối cùng của sê-ri ROS Cơ Bản này, chúng ta sẽ kết hợp mọi thứ đã học được cho đến nay để hoàn thành một nhiệm vụ cuối cùng: di chuyển robot bằng cử chỉ tay. Ý tưởng Ý tưởng để làm phần này thật ra rất đơn giản và cũng không có gì mới. ...

In this final chapter of the series ROS 101, we are going to combine everything we have learned so far to finish one last challenge: moving the robot with our hand signs. The idea The idea is pretty simple and there is actually nothing new. In the pr...

Hãy cùng tiếp tục chương trước bằng việc dùng Xacro để cải tiến mô tả robot (URDF) và thêm nhiều thuộc tính hơn để mô phỏng và điều khiển robot trong Gazebo. Code ở phần này nhìn có vẻ dài dòng (vì XML luôn yêu cầu các thẻ mở và đóng) nhưng thực ra r...

Software in ROS is organized in packages. A package is a directory containing executables and supporting files that serve a specific purpose. For example, you can have a package for handling reading and processing images from a camera. After building (compiling) your package (more on this later), you can call or investigate your program in a terminal. ROS packages are placed in another directory called a catkin workspace because they are built with catkin tools.
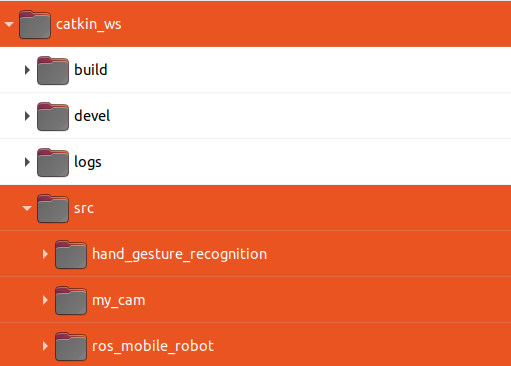
In the example above, there are 3 packages named: hand_gesture_recognition, my_cam, and ros_mobile_robot which are placed in the folder src inside the workspace folder named catkin_ws. The other folders: build, devel, and logs are automatically generated after the packages are built. So, either ROS packages or workspace, just think about them as folders with specific required components that I will mention below.
According to the official ROS website, "The name catkin comes from the tail-shaped flower cluster found on willow trees -- a reference to Willow Garage where catkin was created." For now, you should only need to keep in mind that catkin is the official build system of ROS. If you want to know more about it, give this a read.
A workspace is nothing but a folder, so you create one simply by making a new folder. You can either right-click in the Home folder (where we can easily access it) and choose New Folder, or use the shortcut Ctrl + Shift + N. Then, you also need to create a folder src inside your workspace folder. Since we are using Linux, let's do it the "Linux" way by executing commands in a terminal. Open a terminal and type:
mkdir -p ~/catkin_ws/src
mkdir means making directory, -p means parents, and ~ is short for the Home folder. This command will create a folder named catkin_ws (again, you can name it anything you like) with a subfolder named src. Pretty convenient, right? Then, change the working directory of the current terminal to the workspace folder by using the cd command (cd means change directory):
cd ~/catkin_ws
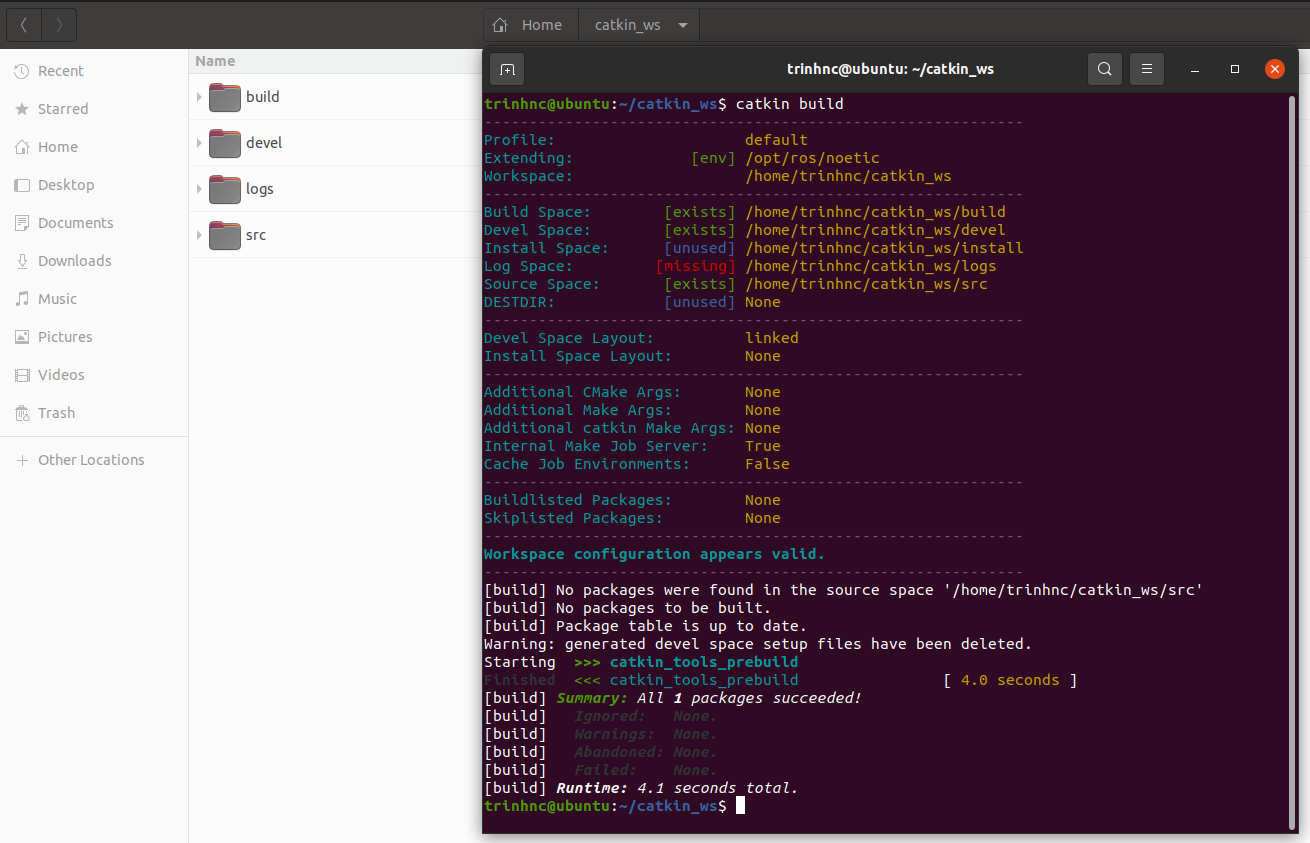
Now even though there are no packages in your workspace, you can start building it by using the catkin_make or catkin build command. I prefer catkin build mainly because with catkin_make, it always builds all the packages which will take a long time if the workspace contains many packages. With catkin build, it is possible to build each package separately. Remember to run source ~/catkin_ws/build/setup.bash beforehand if you have not done it when opening the terminal or have not put this command in the .bashrc yet.
catkin build
After building successfully, your terminal should look like the photo below, and the three folders build, devel, logs are also generated.
As mentioned above, a ROS package is also a folder placed in the src folder of a workspace. However, there are several must-have components that make up a package. They are (this is basically copied from here):
A package.xml file provides meta-information about the package.
A CMakeLists.txt which uses catkin.
Also, each package must have its own folder meaning no nested packages nor multiple packages sharing the same directory.
So what should be included in package.xml and CMakeLists.txt? What are they exactly and why do we need them? Let's find out the answer by just try creating a package. Fortunately, there is a command called catkin_create_pkg for doing that. Assume that we want to create a package named my_cam to read images from our webcam and publish them (the definition of publish will come in the next chapter. Open a terminal and direct it to the ~/catkin_ws/src:
cd ~/catkin_ws/src
then run
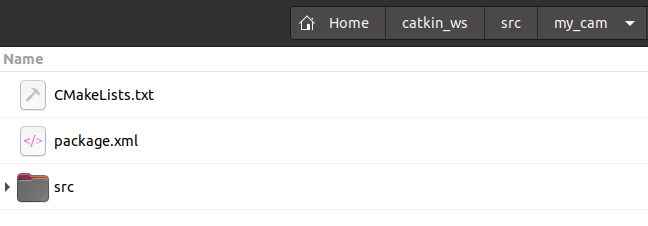
catkin_create_pkg my_cam rospy sensor_msgs
This will create a package (i.e. folder) my_cam with two dependencies rospy and sensor_msgs (I will explain what they are in the next chapter). Inside my_cam there are 2 files package.xml and CMakeLists.txt and a folder src like below.
Open the package.xml and you will find all the information about the package such as the name of maintainers, type of license, and dependencies. Most of the file is commented out (e.g. this is a comment: <!-- The *depend tags are used to specify dependencies -->). In the photo below, I already deleted all the comments

For those of you who have never worked with XML before, it is a markup language similar to HTML which describes elements by tags. For instance, the line <name>my_cam</name> means the package name is defined as my_cam using the opening tag <name> and closing tag </name>.
Next, open the CMakeLists.txt. It also has lots of comments (beginning with #) mainly for instruction. If you work with C/C++ before, you already know that a CMakeLists is used for programs like CMake to find and link all libraries needed to build your package. At the line find_package, you can see the two dependencies rospy and sensor_msgs, which we declared from the command above, are listed. If you had forgotten to declare them, just open the CMakeLists and manually edit.
find_package(catkin REQUIRED COMPONENTS
rospy
sensor_msgs
)
You may notice both package.xml and CMakeLists.txt seem to overlap because many pieces of information are similar (project name, dependencies, etc.). There is a very good answer to what are the differences and why we need both. In short, here are important points:
package.xml contains meta-data (author, maintainer, URL, description and license) that is not necessary to build (or run) a package, but is still needed for ROS to find information about the package (because the information in CMakeLists is not easily parsed without CMake. It is also needed for displaying package information on the ROS wiki for example.
CMakeLists.txt is a build script used by programs like CMake to find and link all the libraries needed to build packages.
Don't be discouraged if all of these overwhelm you. You will get used to them soon. For now, just remember that a ROS package always requires the 2 files package.xml and CMakeLists.txt, and a folder src is where you keep your code.
Wow, that's a long post and we made it! In the coming parts, we will go through all the core concepts of ROS: Topic, Node, Publisher, Subscriber, etc., and start writing some codes for our my_cam package. Meet you there!
A ROS package is a folder containing executables and supporting files that serve a specific purpose.
A ROS workspace is a folder where you modify, build, and install packages using catkin tools.
Two files package.xml and CMakeLists.txt must be included in a package. To create a package, use the command catkin_create_pkg.