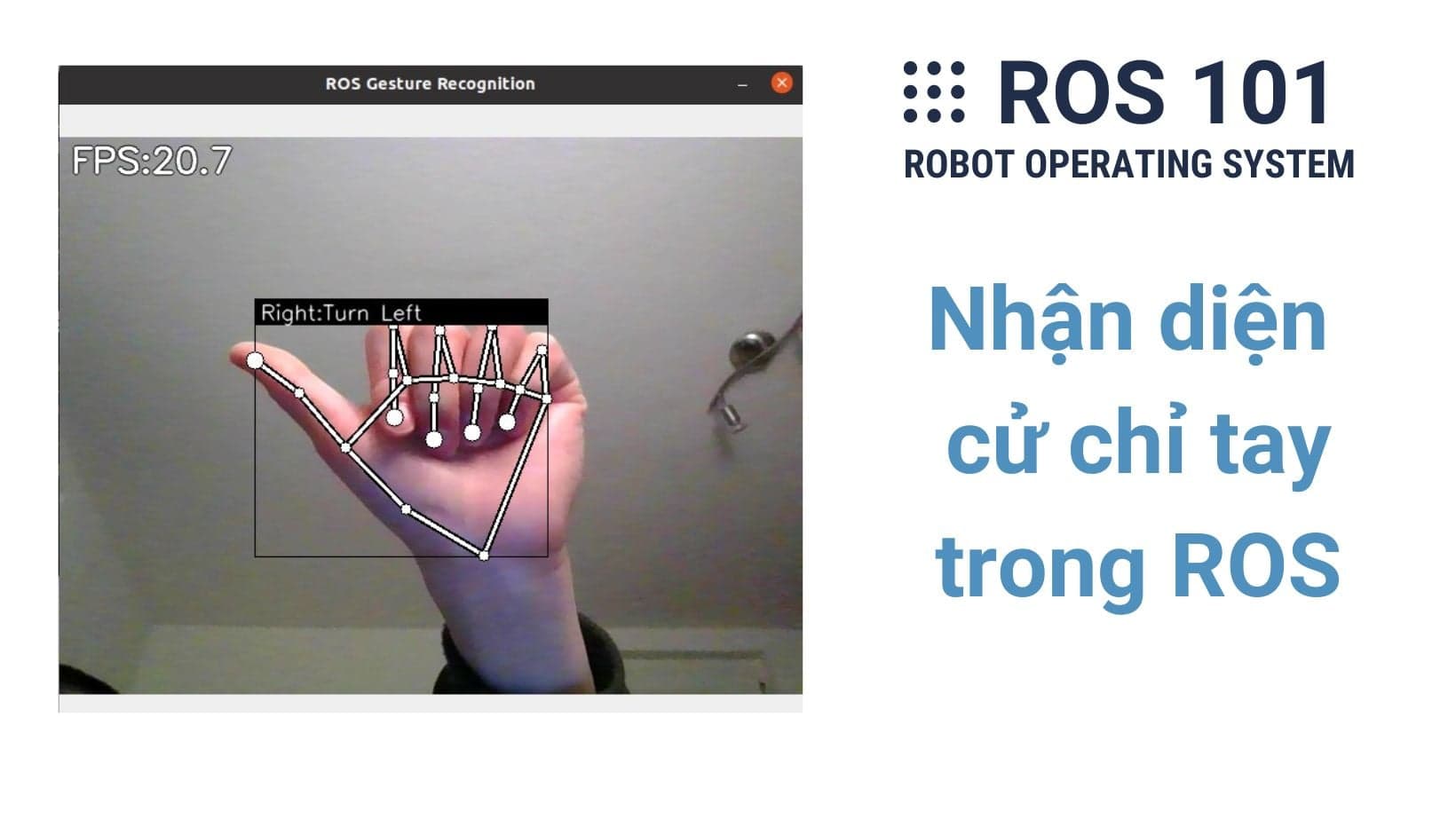
12. Điều Khiển Robot Bằng Cử Chỉ Tay
Trong chương cuối cùng của sê-ri ROS Cơ Bản này, chúng ta sẽ kết hợp mọi thứ đã học được cho đến nay để hoàn thành một nhiệm vụ cuối cùng: di chuyển robot bằng cử chỉ tay. Ý tưởng Ý tưởng để làm phần này thật ra rất đơn giản và cũng không có gì mới. ...
Mar 16, 20236 min read4.2K