

1. Tổng Quan về Series ROS Cơ Bản
Trong loạt bài này, thông qua 5 bước chính (xem hình bên dưới) mình sẽ hướng dẫn bạn tìm hiểu và bắt đầu sử dụng Robot Operating System - ROS, một trong những nền tảng phổ biến nhất hiện nay cho phát triển robot.
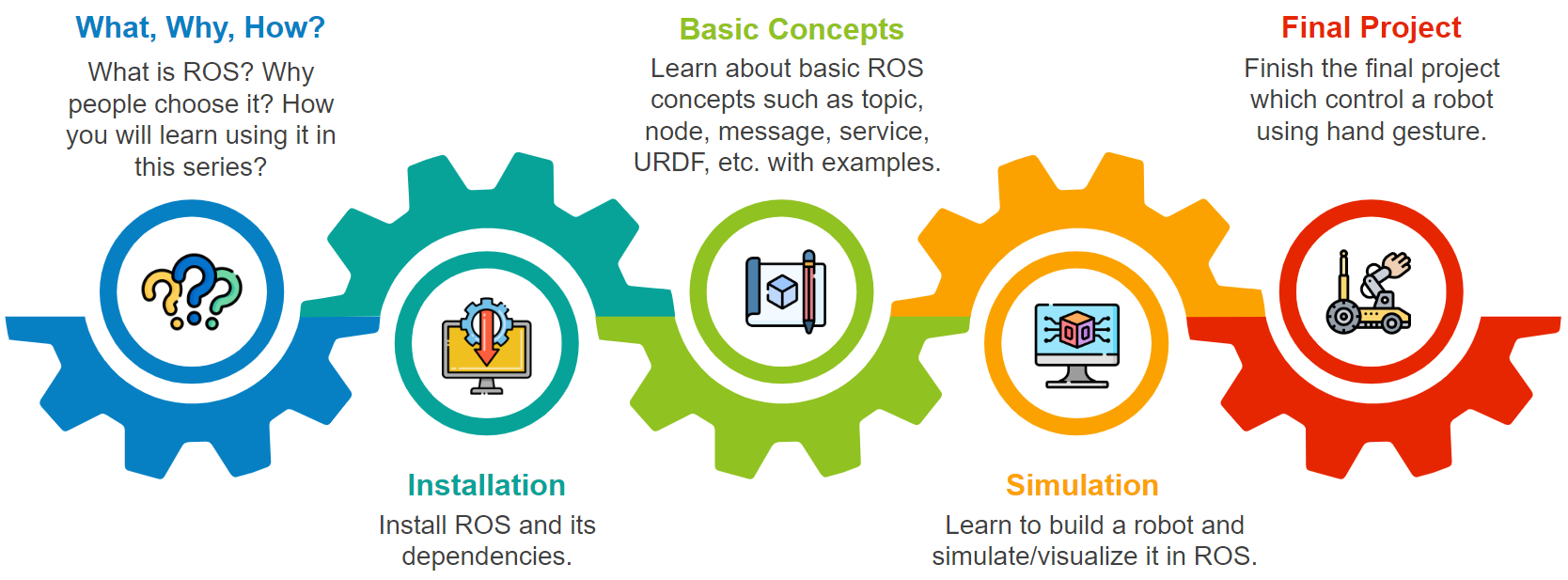
Chúng ta sẽ bắt đầu bằng việc trả lời những câu hỏi: ROS là gì, tại sao mọi người (và bạn cũng nên) chọn ROS và cách bạn sẽ tìm hiểu về nó thông qua sê-ri này. Bước thứ hai là cài đặt ROS và tất cả các phần mềm cần thiết để nó chạy được trên máy tính của bạn. Tiếp theo, chúng ta sẽ xem xét các khái niệm cơ bản nhất của ROS và thực hành sử dụng chúng. Bạn cũng sẽ học cách tạo một robot di động đơn giản, mô phỏng và điều khiển nó. Cuối cùng, chúng ta sẽ tổng hợp mọi thứ đã học để hoàn thành một dự án nhỏ: điều khiển robot bằng ký hiệu tay.
Vậy để hoàn thành tất cả các phần đó cần những yêu cầu gì? Mình biết hầu hết các bạn là người mới bắt đầu trong lĩnh vực này và không có (hoặc thậm chí không đủ khả năng) các công cụ đắt tiền như card đồ họa, động cơ, bộ điều khiển động cơ, v.v. để chế tạo một robot thực sự nhưng không sao hết. Một trong những mục đích chính của sê-ri này là giúp bạn tiếp cận ROS với ít kinh phí và công sức nhất có thể.
Về phần cứng, bạn cần một máy tính và một chiếc USB webcam. Tốt nhất là một chiếc laptop vì thường nó đã tích hợp sẵn webcam. Lý do cần có webcam là vì nó là một chiếc camera hoạt động tương tự như đa số các camera dùng trong công nghiệp (pinhole camera). Ngoài ra, mình chọn camera thay vì các cảm biến khác vì nó phổ biến, thực tiễn và dễ hình dung.
Đối với phần mềm, bạn cần có một chút kiến thức về lập trình Python hoặc C++ vì chúng là hai ngôn ngữ chính được hỗ trợ bởi ROS (Python sẽ được sử dụng chủ yếu trong sê-ri này). Nếu bạn biết về Linux và đã sử dụng qua nó thì đó sẽ là một lợi thế lớn. Nếu không, cũng không có vấn đề gì vì đây là cơ hội để bạn tìm hiểu một trong những hệ điều hành tuyệt vời nhất dành cho developer. Bạn cũng không cần phải có một máy tính khác hoặc cài 2 hệ điều hành song song. Mình sẽ đề cập vấn đề này sau trong chương Cài đặt.
Dưới đây là tổng hợp những yêu cầu về hardware và software bạn cần có:
Máy tính xách tay hoặc PC (không cần hệ điều hành cụ thể) có webcam tích hợp hoặc USB webcam. Máy tính phải có ít nhất 4GB RAM, Intel® i5 lõi tứ hoặc tương đương và ít nhất 20 GB dung lượng ổ đĩa trống. Một card đồ họa (GPU) không bắt buộc nhưng là một lợi thế.
Biết một chút về lập trình với Python hoặc C++ (hoặc bất kỳ ngôn ngữ OOP nào)
Và thế là bạn đã sẵn sàng cho hành trình chinh phục ROS. Cùng bắt đầu nhé!
Sê ri ROS cơ bản có tổng cộng 12 chương:
Tổng Quan về Series ROS Cơ Bản (bài này)
Cài đặt ROS - Phần 2: Cài ROS Noetic và Những Thư Viện Liên Quan
Trích dẫn
Ảnh bìa: http://wiki.ros.org/cturtle
Icons: https://www.flaticon.com/




