4. Cài đặt ROS - Phần 2: Cài ROS Noetic và Những Thư Viện Liên Quan

Search for a command to run...
Em có cài ros noetic hay là version khác? Nếu đúng là Noetic thì xem lại phần cài đặt xem.
cám ơn Tác giả đã có bài viêt chi tiết dễ hiểu cho người mới bắt đầu! tác giả có thể cho mình xin địa chỉ gmail hoặc facebook mình có chút trao đổi với tác giả được không nhỉ! mail của mình là cuongdtvt210887@gmail.com. Cám ơn bạn nhiều!
Trong series này, mình sẽ giúp các bạn tìm hiểu và thực hành những khái niệm cơ bản của ROS (Robot Operating System) bằng cách tự tạo ra một con robot và cách điều khiển nó. Cùng bắt đầu nhé!
Phần mềm trong ROS được sắp xếp thành các packages - gói dữ liệu. Một package là một thư mục chứa các chương trình (executable files) và tệp hỗ trợ phục vụ cho một mục đích cụ thể. Ví dụ: bạn có thể có một package để đọc và xử lý hình ảnh từ camera. ...
As said in the previous post, I will not wait until the robot is complete and then make tutorials. This project log contains all the newest updates (ideas, changes, problems, etc.) that I encounter during this project from the start to the end. As al...

After the ROS 101 series, I am now planning to bring the mobile robot to life. Below are my rough idea and plan, but they will be updated regularly as the project grows. So stay tuned! The Idea The goal of this project is simple: to understand how al...

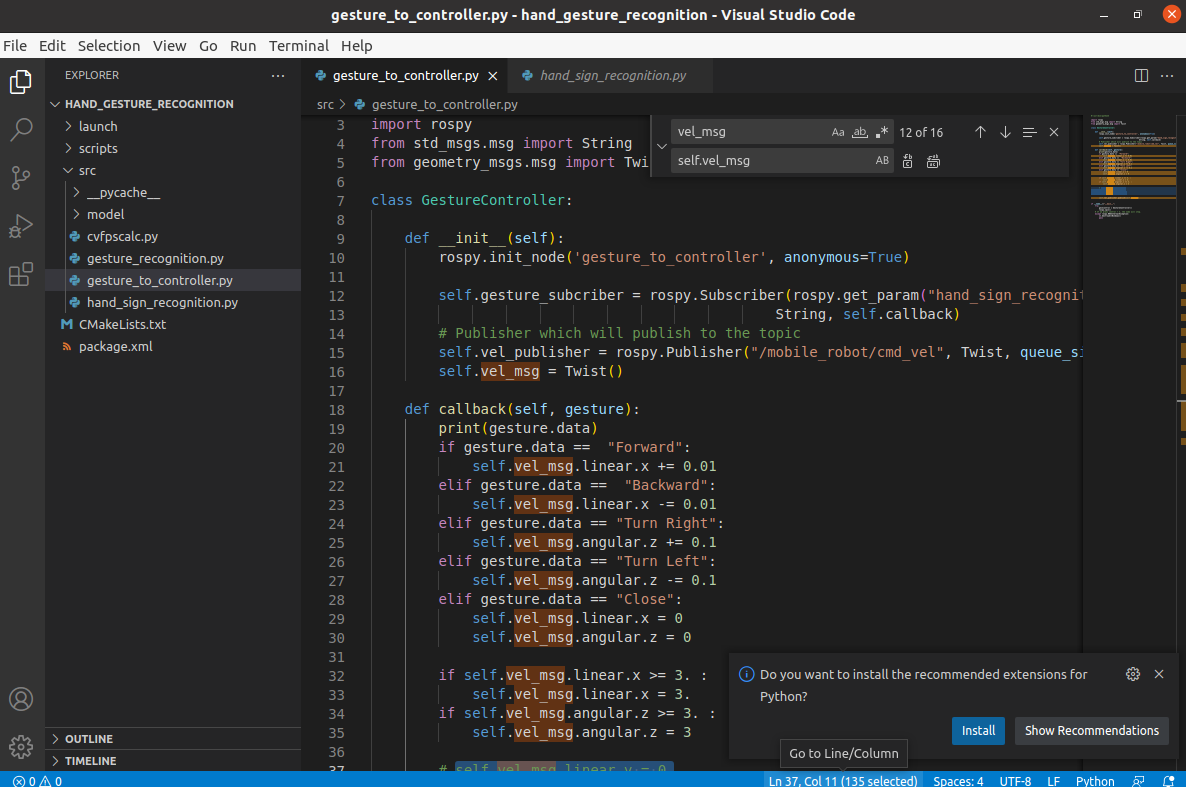
Trong chương cuối cùng của sê-ri ROS Cơ Bản này, chúng ta sẽ kết hợp mọi thứ đã học được cho đến nay để hoàn thành một nhiệm vụ cuối cùng: di chuyển robot bằng cử chỉ tay. Ý tưởng Ý tưởng để làm phần này thật ra rất đơn giản và cũng không có gì mới. ...

In this final chapter of the series ROS 101, we are going to combine everything we have learned so far to finish one last challenge: moving the robot with our hand signs. The idea The idea is pretty simple and there is actually nothing new. In the pr...

Hãy cùng tiếp tục chương trước bằng việc dùng Xacro để cải tiến mô tả robot (URDF) và thêm nhiều thuộc tính hơn để mô phỏng và điều khiển robot trong Gazebo. Code ở phần này nhìn có vẻ dài dòng (vì XML luôn yêu cầu các thẻ mở và đóng) nhưng thực ra r...

Trong phần này, mình sẽ giúp bạn cài đặt ROS Noetic Ninjemys. Mỗi phiên bản ROS sẽ tương ứng với một phiên bản Ubuntu và ROS Noetic (chạy trên Ubuntu 20) là phiên bản mới nhất và cũng là phiên bản cuối cùng của ROS 1.
Đối với những bạn chưa từng dùng Linux (Ubuntu là một bản phân phối Linux - Linux distribution), bạn sẽ cần học cách sử dụng terminal để thực hiện các câu lệnh.
Mở terminal bằng tổ hợp phím Ctrl + Alt + T hoặc nhấp chuột phải vào khoảng trống trong bất kì thư mục nào và chọn Open in Terminal. Gõ lệnh sau vào:
sudo apt-get update
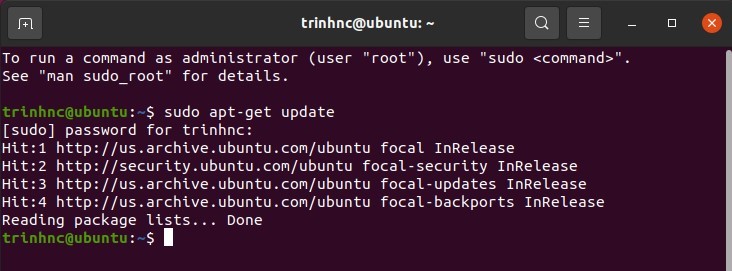
Câu lệnh trên dùng để update những phần mềm trong Ubuntu nếu chúng có bản cập nhật (release) mới. Trong Linux, khi bạn chạy một lệnh với sudo nghĩa là bạn chạy với tư cách quản trị viên (giống như Run as Administrator trong Windows). Và đừng ngạc nhiên nếu bạn không thấy gì khi nhập mật khẩu vì nó bị ẩn đi. Ấn Enter sau khi nhập và nếu mật khẩu đúng, lệnh sẽ được thực thi.
Bước 1: Trong cùng terminal, tiếp tục chạy lệnh này để thiết lập sources.list để máy tính của bạn chấp nhận phần mềm từ packages.ros.org. Lệnh này khá dài, vì vậy bạn chỉ cần copy&paste. Để paste một đoạn text vào terminal, bạn có thể nhấp chuột phải và chọn Paste hoặc sử dụng phím tắt Ctrl + Shift + V (tương tự, để copy nội dung nào đó từ Terminal, chỉ cần sử dụng Ctrl + Shift + C).
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
Bước 2: Thêm khóa xác thực (authenticated key) để máy của bạn có thể kết nối với máy chủ và tải các gói dữ liệu. Cài curl nếu bạn chưa có: sudo apt install curl. Sau đó, chạy lệnh này:
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
Nếu nó in ra OK, thì key đã được thêm thành công.
Bước 3: Cài ROS Noetic phiên bản Desktop-Full. Trước tiên, chạy cập nhật: sudo apt update. Sau đó bắt đầu cài đặt bằng cách chạy (bước này sẽ mất khoảng 30 phút):
sudo apt install ros-noetic-desktop-full
Bước 4: Sau khi cài đặt xong, để chạy ROS, trước tiên bạn cần gọi lệnh source này trong terminal.
source /opt/ros/noetic/setup.bash
Việc này chỉ cần làm một lần nhưng nếu bạn mở một terminal mới, bạn cần chạy lại nó. Để tránh điều này, bạn có thể thêm lệnh đó vào file.bashrc (có dấu chấm) bằng cách:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
File .bashrc này chứa tất cả các lệnh được tự động thực thi khi bạn mở một terminal mới. Khi bạn chỉnh sửa file .bashrcvà muốn áp dụng ngay vào terminal hiện tại mà không muốn mở một terminal mới, bạn có thể dùng câu lệnh source:
source ~/.bashrc
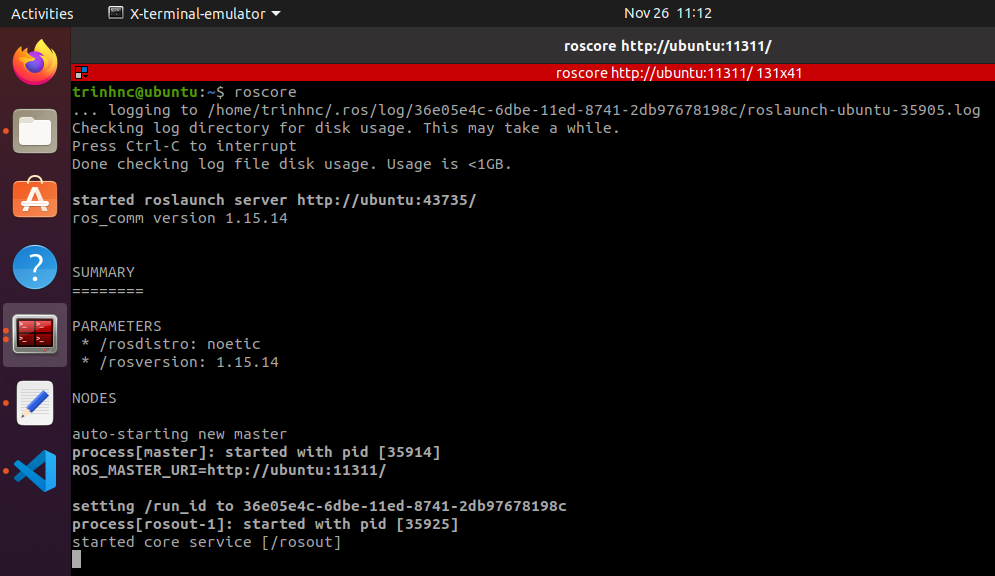
Cuối cùng, chạy roscore và nếu terminal của bạn giống hình dưới đây thì xin chúc mừng! Bạn đã cài đặt ROS thành công!
Có một số phần mềm bạn cần cài đặt để có thể tạo ứng dụng của mình trong ROS. Chúng gọi là những dependencies. Chạy lệnh sau trong một terminal:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential python3-catkin-tools python3-osrf-pycommon python3-pip
, sau đó:
sudo rosdep init
, và cuối cùng:
rosdep update
Xong bước này, mọi thứ đã sẵn sàng cho bạn để bắt đầu sử dụng ROS. Làm rất tốt!
Phần này chỉ là những đề xuất của mình mà bản thân mình đang sử dụng và thấy rất hữu ích.
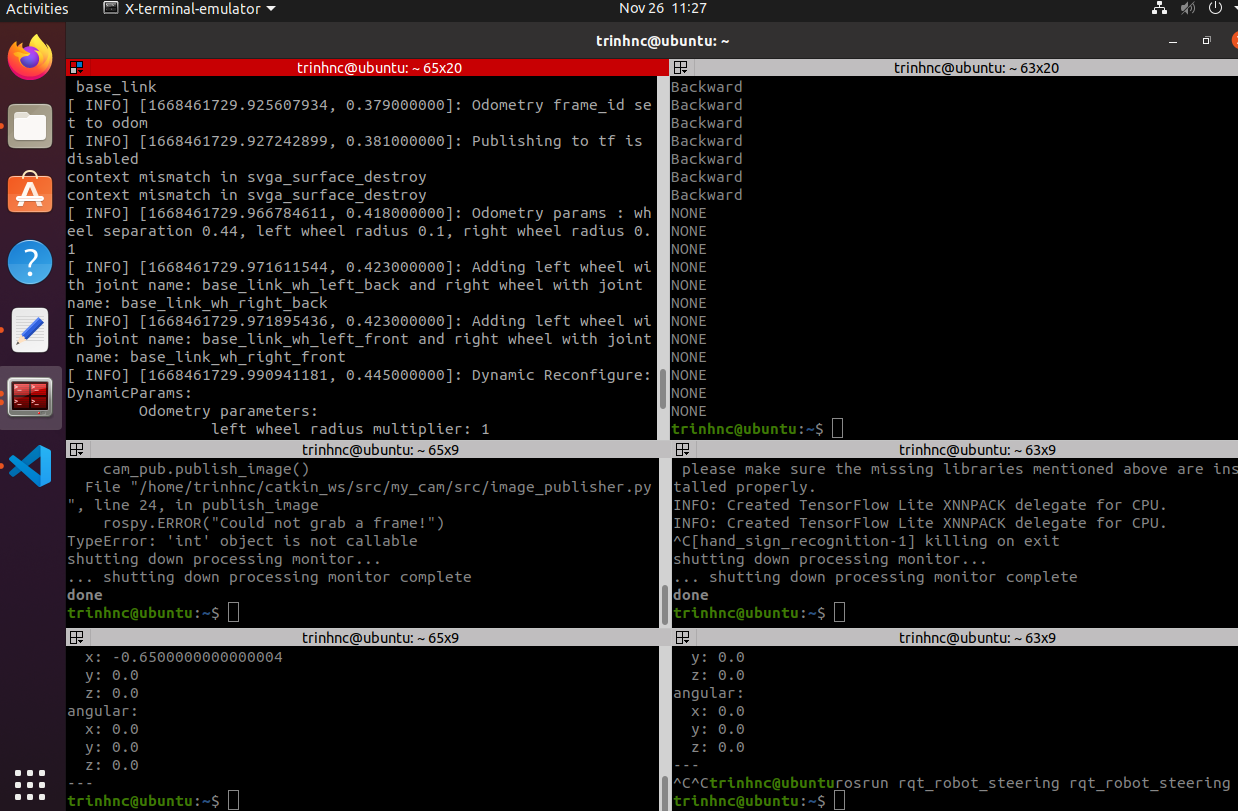
Để cài đặt Terminator, hãy chạy lệnh này:
sudo apt install terminator
Mình cũng khuyên bạn nên xem qua danh sách phím tắt của Terminator này và nhớ một vài phím tắt cơ bản như thêm bớt terminal để sử dụng nhanh hơn.