#vietnamese
Read more stories on Hashnode
Articles with this tag
Trong chương cuối cùng của sê-ri ROS Cơ Bản này, chúng ta sẽ kết hợp mọi thứ đã học được cho đến nay để hoàn thành một nhiệm vụ cuối cùng: di chuyển...
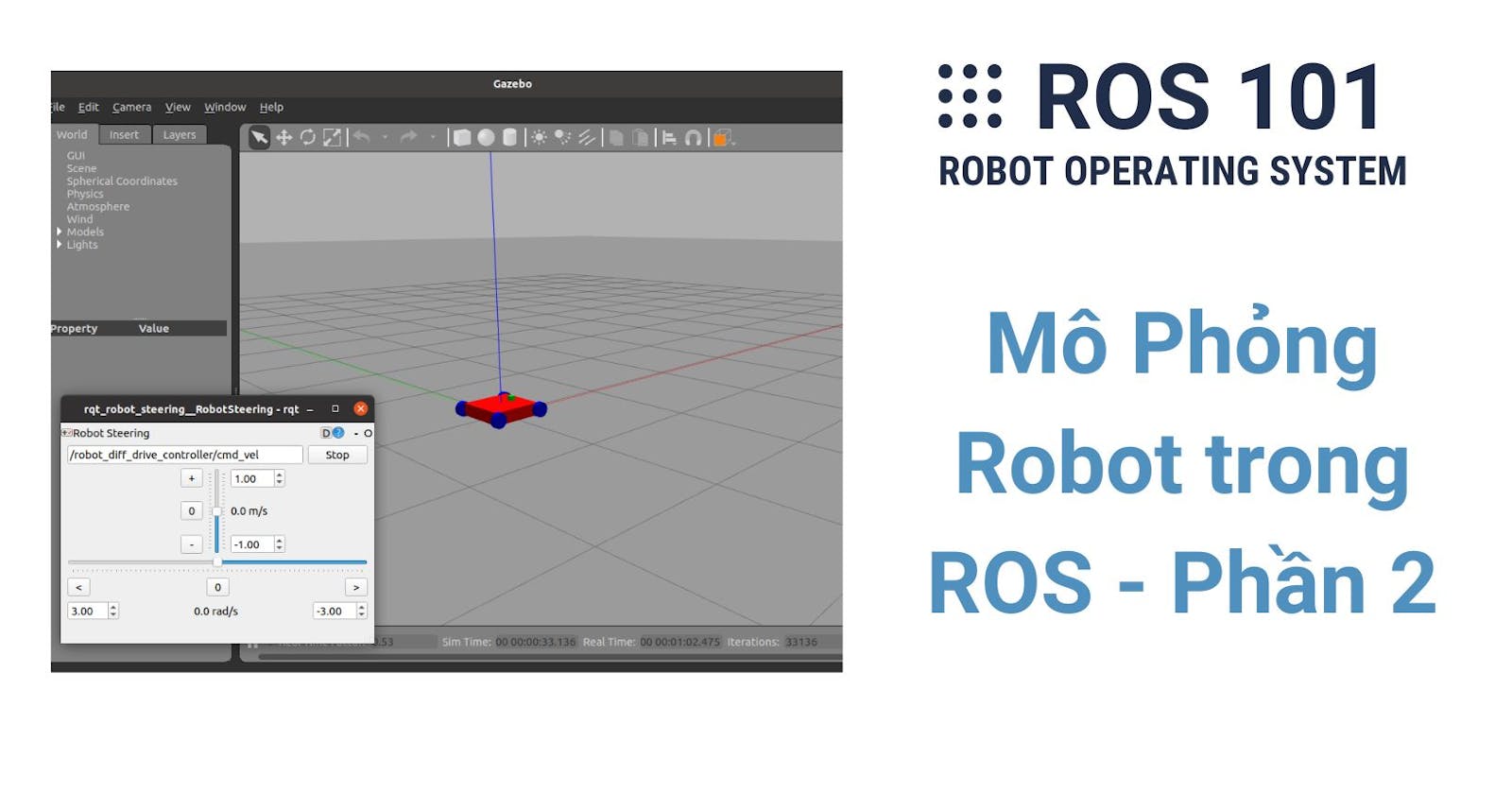
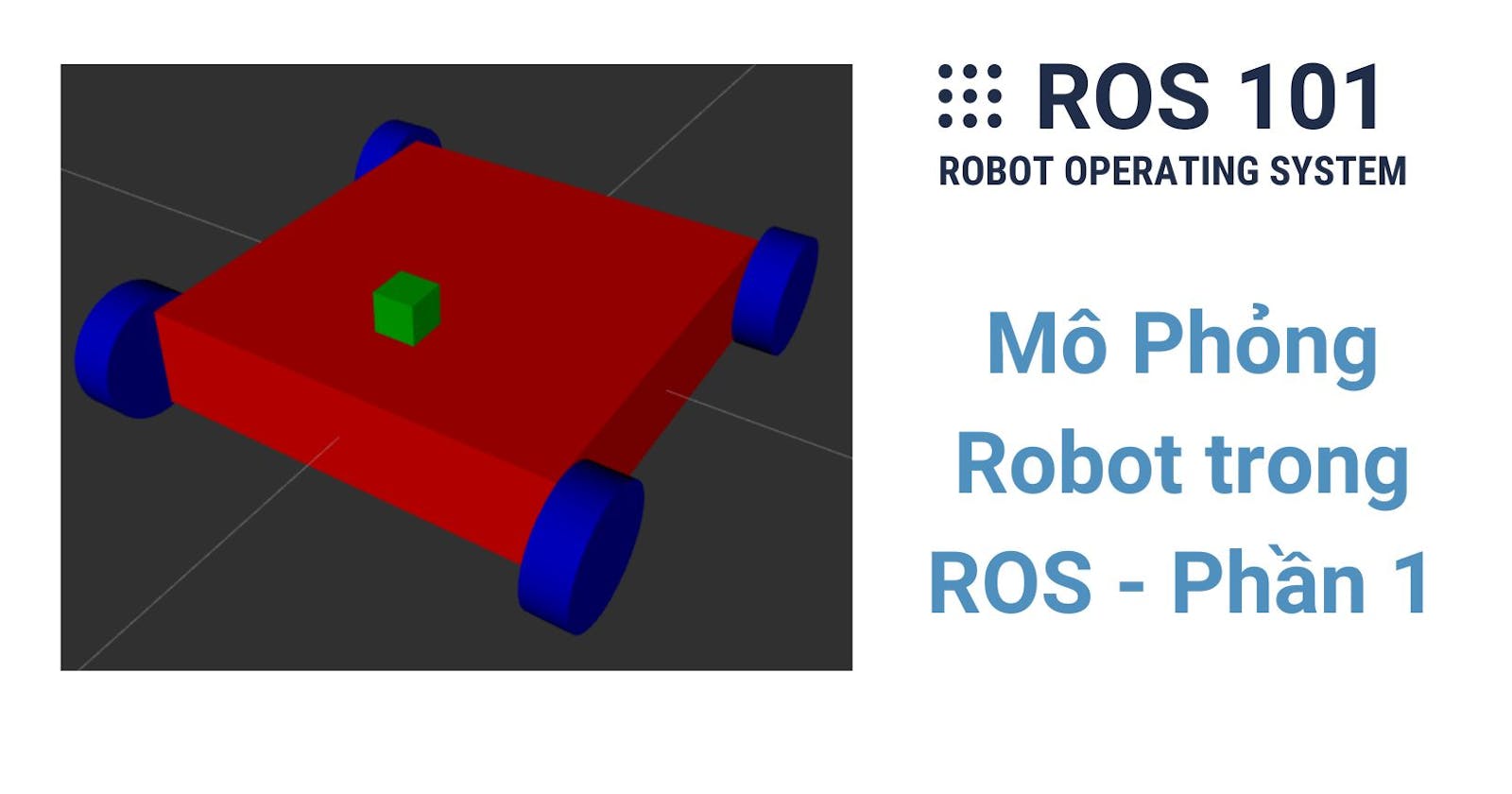
Hãy cùng tiếp tục chương trước bằng việc dùng Xacro để cải tiến mô tả robot (URDF) và thêm nhiều thuộc tính hơn để mô phỏng và điều khiển robot trong...
Trong chương này và chương tiếp theo, bạn sẽ học cách mô phỏng một rô-bốt và hiển thị trạng thái của nó bằng hai chương trình đi kèm với ROS là Gazebo...
Hy vọng bạn vẫn nhớ một trong những lý do rất quan trọng mà chúng ta tìm hiểu ROS: "Don't reinvent the wheel", nghĩa là có rất nhiều package (hoặc...
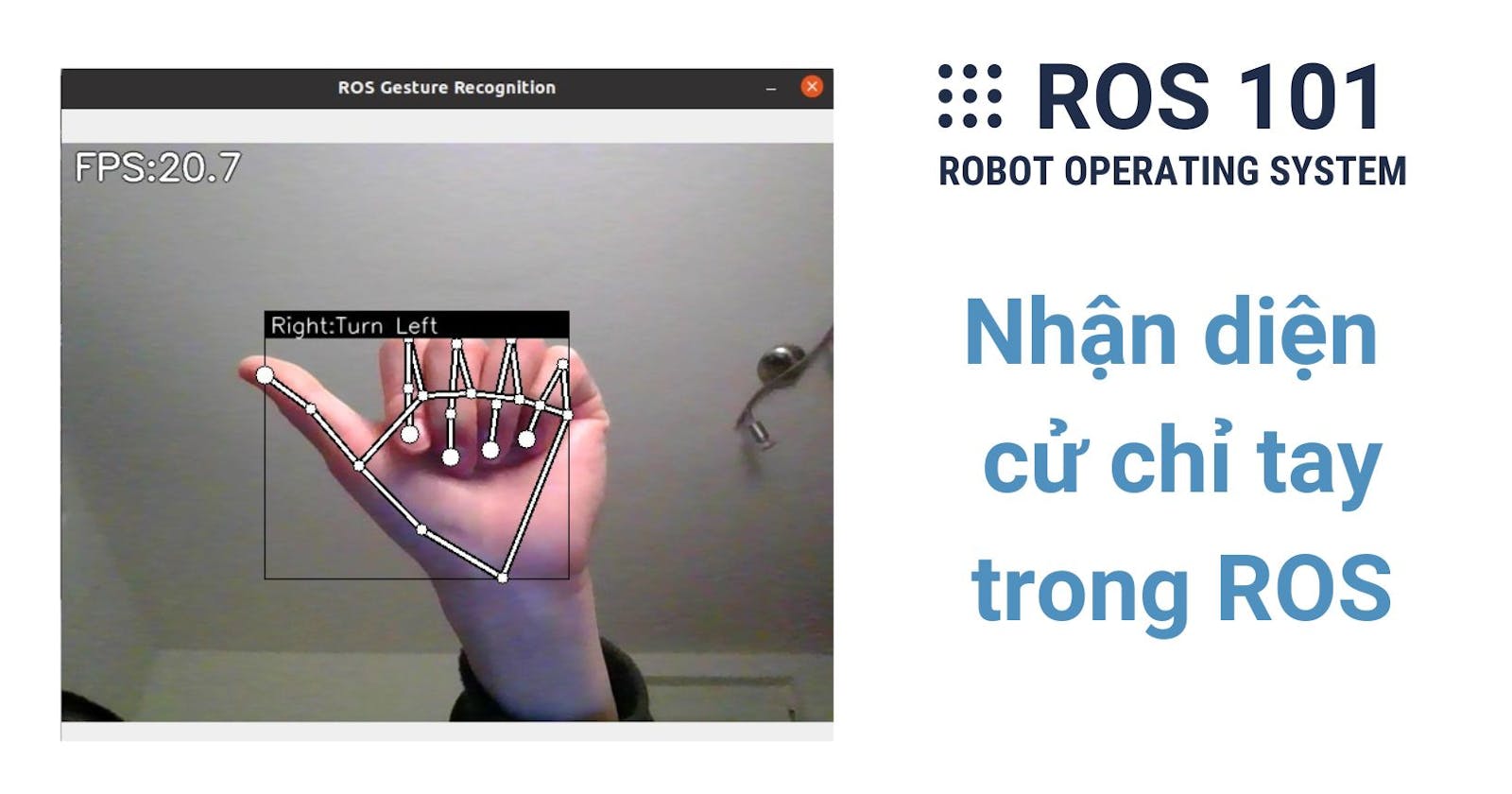
Trong phần này, mình sẽ hướng dẫn bạn tạo một image subscriber đơn giản (hay "Người In Ấn" trong ví dụ từ phần trước). Subscriber này sẽ liên tục đọc...
Bạn có thể bắt đầu với tutorial Writing a Simple Publisher and Subscriber (Python) trên trang chủ của ROS nhưng nó không thú vị cho lắm vì chỉ in...